今天是 lm358 运算放大器 ,主要是以下几个方面:
- 1、什么是 lm358?
- 2、lm358 引脚图及功能
- 3、lm358 cad 模型
- 4、lm358 工作原理
- 5、lm358 特性参数
- 6、lm358 经典典型电路
lm358 运算放大器属于一种低功率双运算放大器,由两个独立的高增益内部频率补偿运算放大器组成,专门设计用于在宽电压范围内由单电源供电。
lm358 运算放大器具有低功耗、共模输入电压范围扩展到地/vee以及单电源或双电源操作。与单电源应用中的标准运算放大器类型相比,它具有几个明显的优势。
该放大器可在低至 3.0 v 或高达 32 v 的电源电压下工作。共模输入范围包括负电源,因此在许多应用中无需使用外部偏置组件。输出电压范围还包括负电源电压。
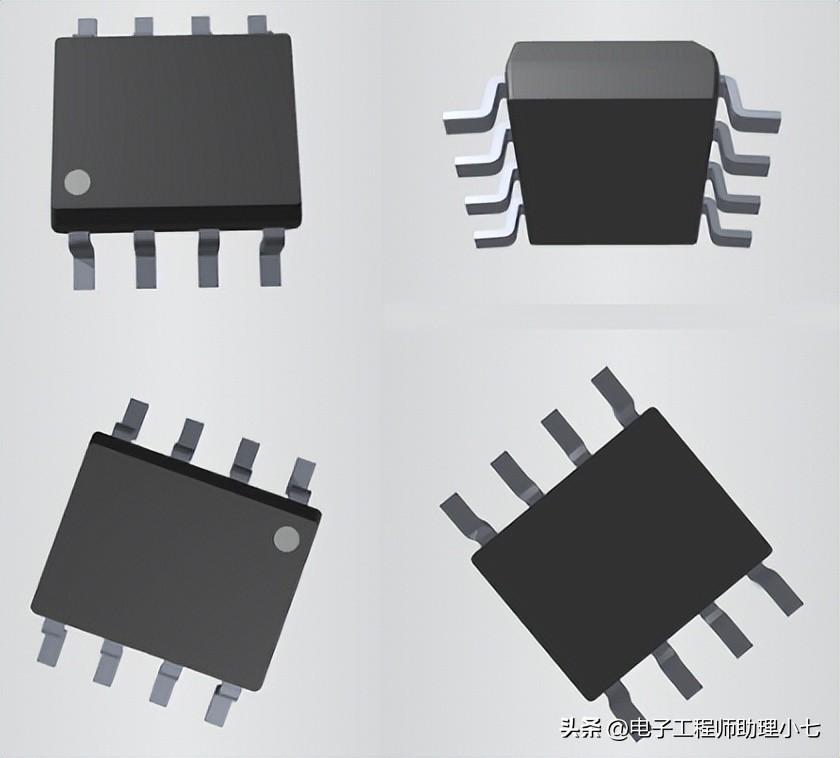
lm358 运算放大器实物图
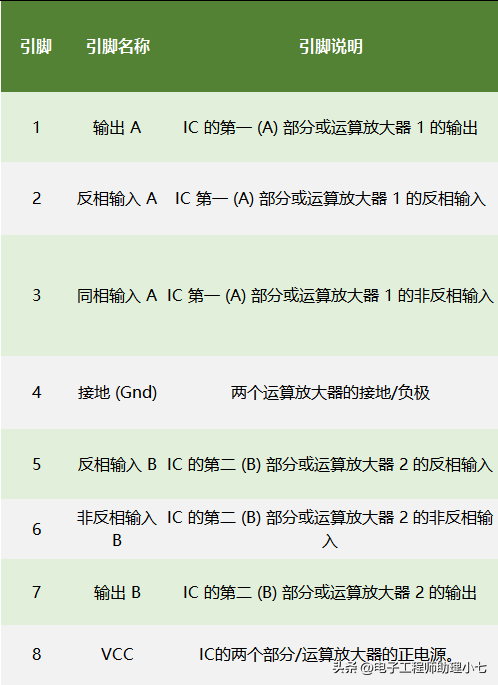
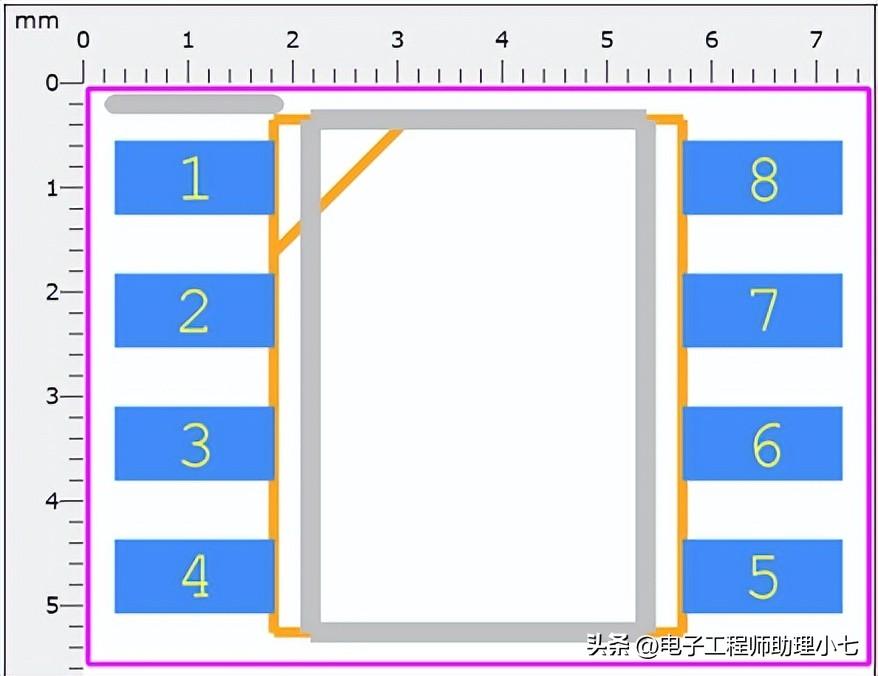
lm 358 共有 8 个引脚,每个引脚具有不同的单独功能,下面为 lm 358引脚图及功能。
- 引脚 1 和引脚 8 是比较器的输出。
- 引脚 2 和引脚 6 为反相输入。
- 引脚 3 和引脚 5 是同相输入。
- 引脚 4 是 gnd 端子。
- 引脚 8 是 vcc 。
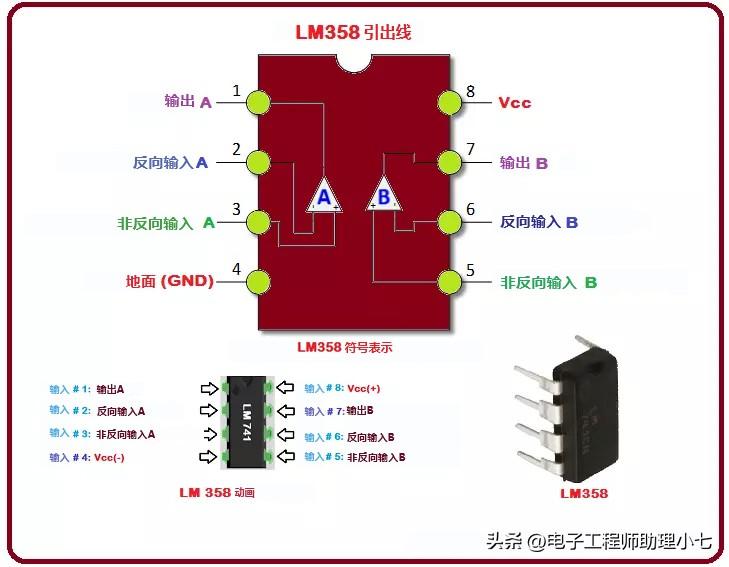
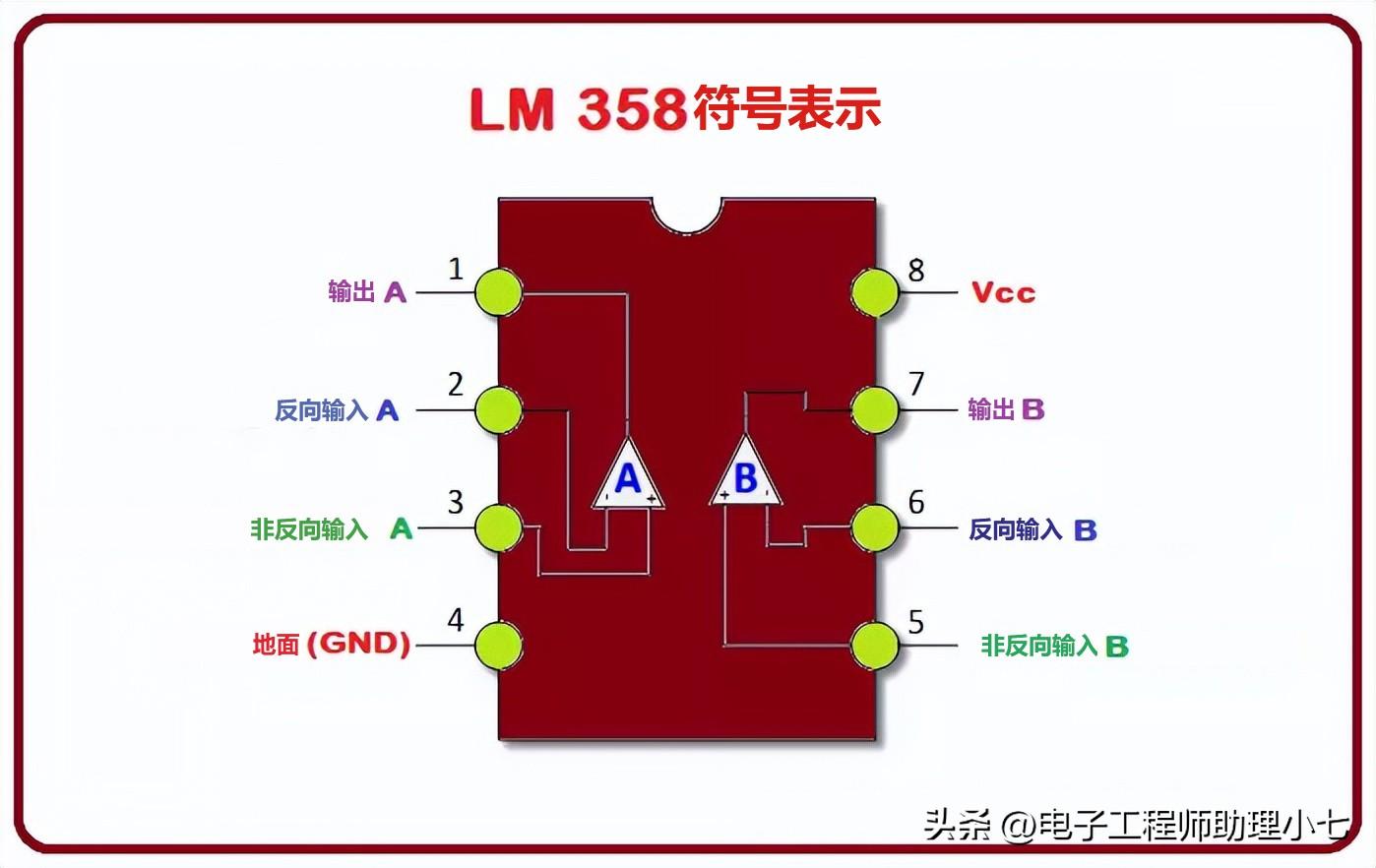
lm358 引脚图及功能
运算放大器:
运算放大器,或简称运算放大器,本质上是一种直流耦合高增益电压放大设备,它们非常适合用于信号调理、直流放大、滤波,并可与外部反馈组件(如其输出之间的电容和电阻器)一起使用输入端子。
运算放大器根据其反馈配置执行不同的功能,无论是电阻式、电容式还是两者兼而有之,在此基础上,它可以使用差分放大器、积分器或加法器。
同相输入:
运算放大器的同相输入在lm358的电路图上用“ ”号标记,同相输入为3 引脚。发现正电压施加到同相输入,然后它不会发生变化,它将在输出端产生正摆动。
如果将变化的波形(例如正弦波)应用于非反相输入(例如 lm358 中的引脚 3),那么它将以相同的方式出现在输出端,它没有被倒置。
反相输入:
运算放大器的反相输入在 lm358 的电路图中用“-”号标记,反相输入为 2 号引脚。
当在反相输入端施加正电压时,将产生负电压摆幅。因此,对反相输入应用正弦波,将在输出端出现反相。
lm358 引脚图及功能
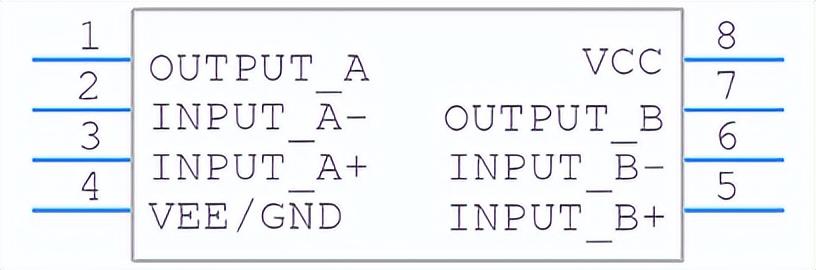
1、 lm358 电路符号图
2、 lm358 封装尺寸图
3、 lm358 3d 模型
lm358 引脚图
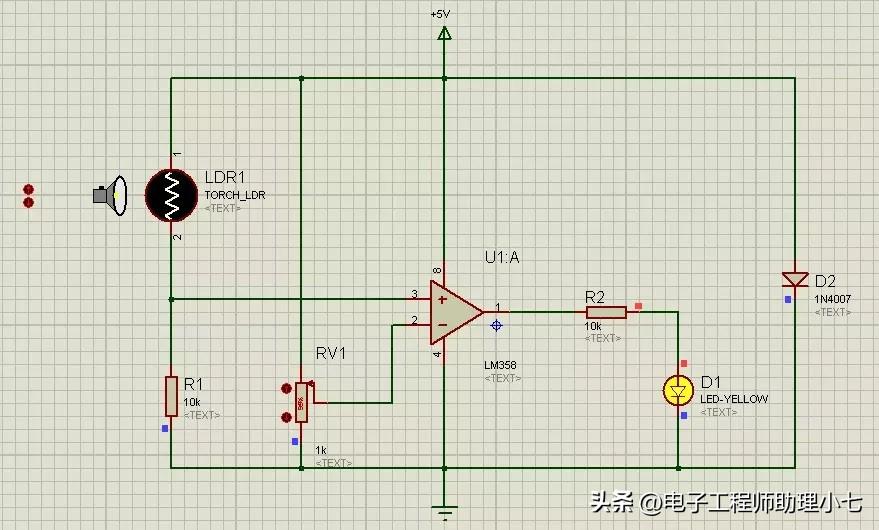
这里设计了一个 lm358 的 proteus 模拟,可以让你更好地了解 lm358 ic 的工作原理。在这个模拟中,根据 ldr 值设计了一个小型自动 led 开关电路。图像如下图所示:
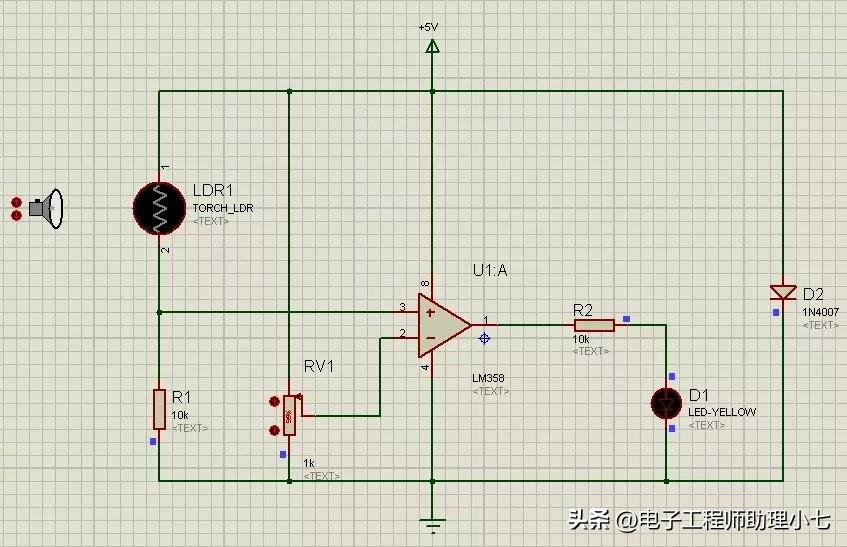
lm358 ic 工作原理
你可以在上图中看到,我将 ldr 连接在输入引脚上,而 led 连接在 lm358 的输出引脚上。
现在,当 ldr 变暗时,led 将保持关闭状态,但当 ldr 亮起时,led 也会亮起。
可变电阻用于灵敏度目,在下图中,显示了它的 on 状态:
lm358 ic 工作原理
你可以在上图中看到现在 led 亮起,因为 ldr 亮着。
- 在单个封装中集成两个运算放大器
- 宽电源范围
- 单电源 - 3v 至 32v
- 双电源 – ±1.5v 至 ±16v
- 输入差分电压范围 ±32
- 低电源电流 – 700ua
- 输入共模电压范围 -0.3 至 32
- 两个运算放大器的单电源可实现可靠运行
- 结温 150˚c
- 工作环境温度 – 0˚c 至 70˚c
- 储存温度范围 - 65˚c 至 150˚c
- 焊针温度 – 260 ˚c(10 秒 – 规定)
- 短路保护输出
- 可用封装:to-99、cdip、dsbga、soic、pdip、dsbga
1、使用lm358的简单震动报警电路
- 使用 lm358的震动报警电路设计简单,在家用汽车上有很多应用。
- 该电路的主要应用是作为汽车的防盗报警器。在此电路中,压电传感器用作震动传感器,必须安装在你必须保护的门上。
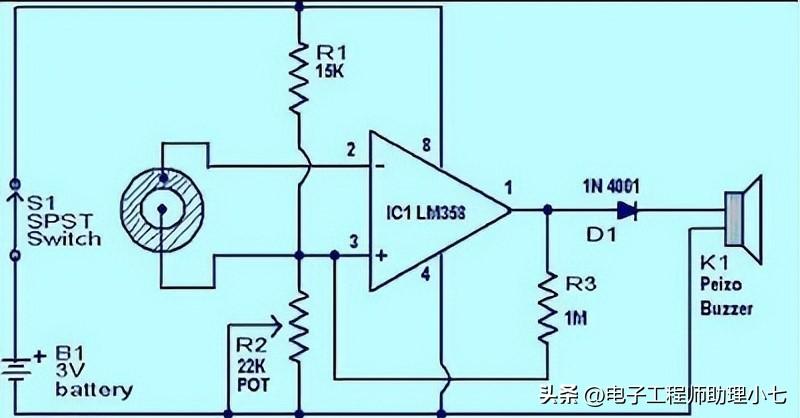
图中所示 lm358 接在反相施密特触发器上。端口 r1 设置电路的阈值电压。r1 用作反馈电阻。
当压电传感器未激活时,压电传感器的输出将为低电平,ic 的输出也为低电平,因此传感器的输出为高电平并作为施密特触发器激活。然后它会发出蜂鸣声。
即使振动已分离,蜂鸣器仍会发出一段时间的蜂鸣声。这是因为,当lm358 ic被触发时,反相输入影响不大,状态不容易反相。因此,将传感器牢固地固定在表面上,无论你将其放置在何处,并且将传感器放置在门把手附近总是好的。
所以这里这个图必须使用 3v电池作为电源,调节r2 寄存器以获得必要的灵敏度。
2、 lm358 的红外接近传感器
1)元器件清单
- lm358
- 10k欧姆电阻
- 220欧姆电阻
- 红外发射器 led
- 红外接收器 led
- 彩色 led
- 电池 5v
- 10k 欧姆可变电阻
红外灯:
ir led 是固体闪电设备,通电时会发出某种形式的电磁辐射。ir led 发出的光比可见光长。使用的红外光电二极管必须能够检测到红外 led 发出的特定波长的 infra red,这一点非常重要。
红外光电二极管:
它是一种特殊类型的二极管,它在暴露于光线时会产生电流,它以反向偏置连接以进行红外线检测。在没有红外辐射的情况下,当光线没有落在它上面时,它具有非常高的电阻和少量电流流过它,称为暗电流。但是当红外线落在它上面时,会产生更多的电荷载流子,并且它的电阻会降低,并且电流开始流动,该电流与落在光电二极管上的辐射强度成正比。在接近传感器中,光电二极管使用此机制来生成电信号。
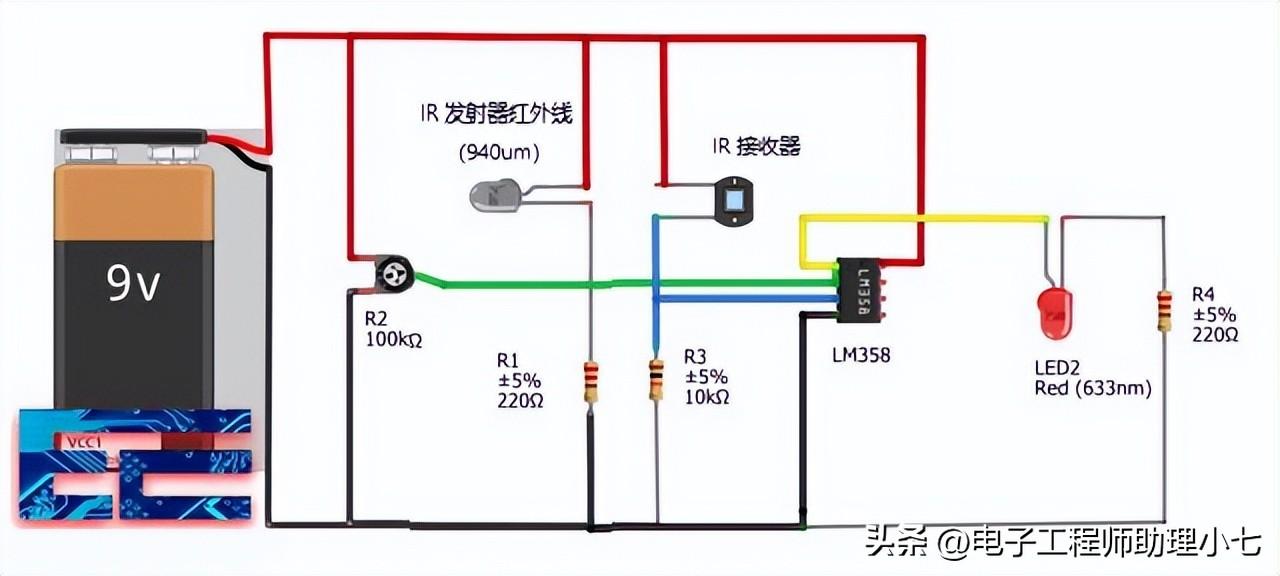
lm358 的红外接近传感器
2)工作原理:
接近传感器遵循的原理非常简单。ir led 和光电二极管相互并联,用作发射器和接收器。光电二极管以反向偏置连接。当障碍物出现在发射器射线的前面时,发射器射线是 ir led 发射器,当该光被反射回来时,它被充当接收器的光电二极管拦截。反射的光线会降低光电二极管的电阻,因此会产生大的电荷载流子并产生电信号。
这个信号实际上是10k电阻上的电压,这是电位器,我们可以通过调整这个电压来调整这个电压,距离也会有所不同。它直接馈送到运算放大器的同相端。运算放大器的功能是比较在引脚 2 和引脚 3 上给它的两个输入。
来自光电二极管的信号被提供给连接 10k 电阻的同相引脚(引脚 3)和阈值电压从电位器到可调节的反相引脚(引脚 2)。如果非反相引脚 2 上的电压大于反相引脚上的电压,则表示光没有落在光电二极管上,则运算放大器输出为高电平,否则输出为低电平。
数字输出为高电平或低电平。避障机器人或线跟随机器人使用接近传感器的数字输出信号来停止机器人的运动或改变机器人的方向。一旦障碍物足够近,信号就可以通过h桥电路直接馈送到电机的输入引脚来驱动电机。
模拟输出是从零到某个有限值的连续值范围。电机驱动器或其他开关器件不能直接使用模拟信号。首先,它们需要由微控制器处理,并通过 adc 和一些编码转换为数字形式。这种输出形式需要一个额外的微控制器,但无需使用运算放大器。
比较器的工作模式很简单:
如果 vin > vref,则 vout = vcc,
参考电压设置在 2 号引脚,如果 vin < vref,则 vout = 0,因为我们将引脚接地。
值得一提的是,此时输出电压将约等于电源电压vout~vcc。
鉴于这些情况,我们将 ir 接收器输出连接到非反向输入(正)意味着我们将 ir 接收器连接到 lm-358 的输入引脚 2。最初我们说当光电二极管不捕获红外辐射时,我们将有大约 0.56v 的电压输出。
因此,我们必须首先给出高于 0.56v 电压的 vref。在这里,我们将使用电位器将高于 0.56v 的值设置到引脚 vref。在这种情况下,在状态 0 中,我们有 vin < vref 且 vout = 0,因此 led 将关闭。
当接收器将捕获辐射时,它将允许更高的电流通过,该电流将超过 vref,我们将有 vin> vref 并且 vout = vcc,大约 9v。
3、使用 lm-358 的太阳能跟踪器
1)元器件清单
|
组件名称 |
数量 |
|
lm-358 |
1 |
|
bc-547 |
2 |
|
bc-557 |
2 |
|
1 kω 电阻 |
2 |
|
10 kω 电阻 |
2 |
|
直流电机 |
1 |
|
电位 50 kω |
1 |
|
ldr |
2 |
|
电池 9-12v |
1 |
bc547 晶体管
本项目使用了两个 bc547 晶体管。bc547 是 npn 双极结型晶体管。这通常用作开关和放大器。我们在这个电路中使用了 bc547 作为开关。在基极施加的电流越小,它可以控制在集电极和发射极的电流越大。
bc557 晶体管
bc547 是 pnp 双极结型晶体管,通常用作开关和放大器。当在基极上施加接地(0)电压时,集电极和发射极将关闭(正向偏置),当在基极上施加正电压时,集电极和发射极将打开(反向偏置)。
ldr(光敏电阻)
ldr 或光相关电阻是可变电阻,它也被称为光敏电阻。这些 ldr、光敏电阻或光敏电阻的工作原理是“光导”。ldr 电阻的变化取决于落在 ldr 表面上的光强度。当光落在 ldr 的表面上时,ldr 的电阻会降低并增加元件的电导率。当没有光落在 ldr 的表面上时,ldr 的电阻很高,从而降低了元件的电导率。
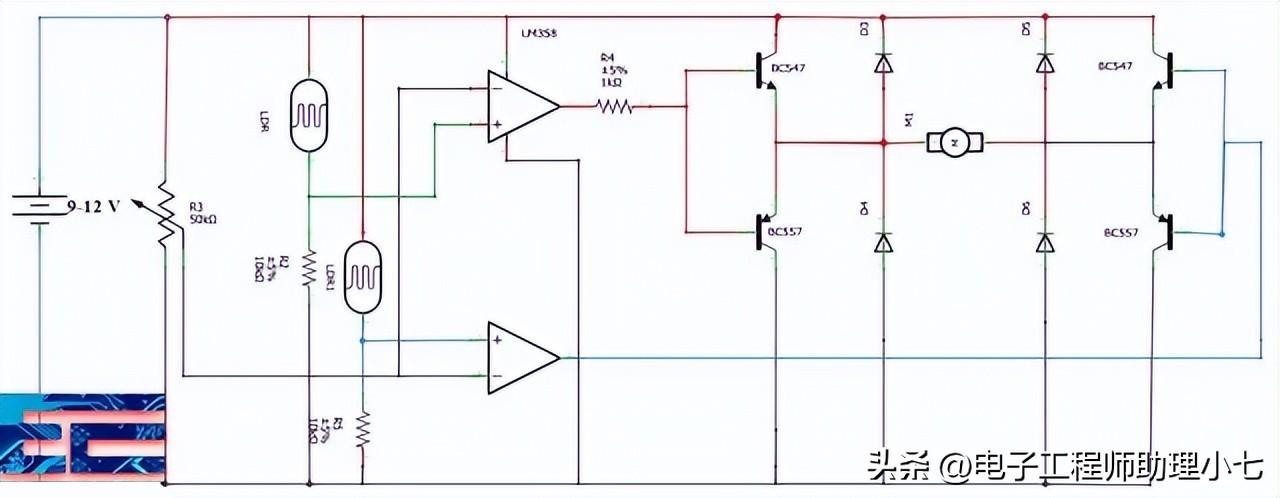
使用 lm-358 的太阳能跟踪器
2)接线说明
ldr1 与 r1(10k) 串联,会改变电压。 ldr1和r1 的 连接点是同相引脚lm358的输入, lm358与lm358 ic的第 3脚 相连,后者是 第一个运算放大器的输入。
同样, ldr2 与 r2(10k) 串联。ldr2 和 r2的 连接点 是 ldr2 的 输出端,连接到 lm358 ic 的引脚 5 。引脚 5 是 第二个运放的 lm358 ic 的同相输入端 。
10k 可变电阻器( rv1) 固定端子 1 连接到 vcc , 固定端子 2 连接到 地。可变电阻器 (rv1)的 可变端子 连接到 ic 引脚 2 和 6。引脚 2 和 6 分别是 ic 的 op-amp 1 和 op-amp 2的反相输入端 。
运算放大器 1 输出引脚 (ic 引脚 1)连接到晶体管 q1 和 q3的 基极端子,而 运算放大器 2 输出引脚 (ic 引脚 7)连接到晶体管 q2 和 q4的基极端子.
晶体管(bc547) q1、q2集电极端接 vcc,晶体管(bc557) q3、q4 集电极端接 地。
三极管q1、q3的 发射极 均 短接 , 通过二极管d1、d3 的连接点 与电机端相连。三极管q2和q4的 发射极 均 短接 , 通过二极管d2和d4 的连接点 与电机端相连。
3)工作原理
lm358 是控制整个系统的主控制器,这里它作为电压比较器工作。当同相输入端( )处的电压大于反相输入端(-)处的电压时,电压比较器的输出将为高电平。
当没有光落在 ldr 表面时,它的电阻很高,那么所有电压都分配在 ldr 上,输出为低电平(接地)。当光线落在 ldr 表面时,它的电阻很低,那么所有电压都分配在电阻上,输出为高电平 (vcc)。
可变电阻用于设置运算放大器 1 和运算放大器 2 的反相 (-) 端的参考电压。
晶体管 bc547 和 bc557 形成一个 h 桥,用于控制电机方向。
当光照在 ldr 上增加时,ldr 的输出电压也在增加。因此,同相 ( ) 端的电压也会增加,当该电压大于参考电压时,运算放大器的输出变为高电平。
|
输入 a |
输入 b |
输出 |
|
0 |
0 |
停止 |
|
0 |
1 |
顺时针 |
|
1 |
0 |
逆时针 |
|
1 |
1 |
停止 |
- 互补对称晶体管 bc547 和 bc557 形成 h 桥,借助它我们控制电机旋转。
- 考虑第一个比较器的输出为高而第二个比较器的输出为低的情况。
- 当 q1 和 q4 开启时,电机将顺时针方向旋转。
- 考虑第一个比较器的输出为低而第二个比较器的输出为高的情况。
- 当晶体管 q2 和 q3 开启时,电机将逆时针旋转。
- 如果两个比较器的输出均为低电平,则晶体管 q3 和 q4 导通,但没有电流流过电机。
- 同样,如果两个比较器的输出都为高电平,晶体管 q1 和 q2 将开启,但没有电流流过电机。
4、使用 lm358的电池监控电路
电池电量指示电路使用双运放 ic lm358 监控 12v 电池的低、正常和满电平。
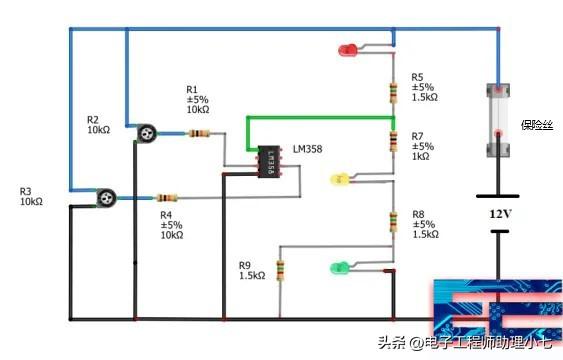
使用 lm358的电池监控电路
1)元器件清单
- 电阻: (1/4 wаttѕ)
- r1 – 10k
- r2 – 10k
- r3 – 10k (电位器)
- r4 – 10k (电位器)
- r5 – 1.5k
- r6 – 1.5k
- r7 – 1k
- r8 – 1.5k
- r9 – 1.5k
- lm358 ic
- ledѕ:红色、绿色、黄色
- 100ma 保险丝
- 12v 电池
2)电路说明
电路监控 12v 电池电压,将显示电池的充电水平,指示低电压、正常电压和满电压。电位器在红色/黄色/绿色 ledѕ 时调整 指示。例如,红色 led 在 11v 时亮起,绿色 led 在 12v 时亮起。黄色 led 在这些值之间重新打开。该项目也可用于监控 4v、6v、24v 等,只需稍作修改。
4、带有 lm358 的光电二极管
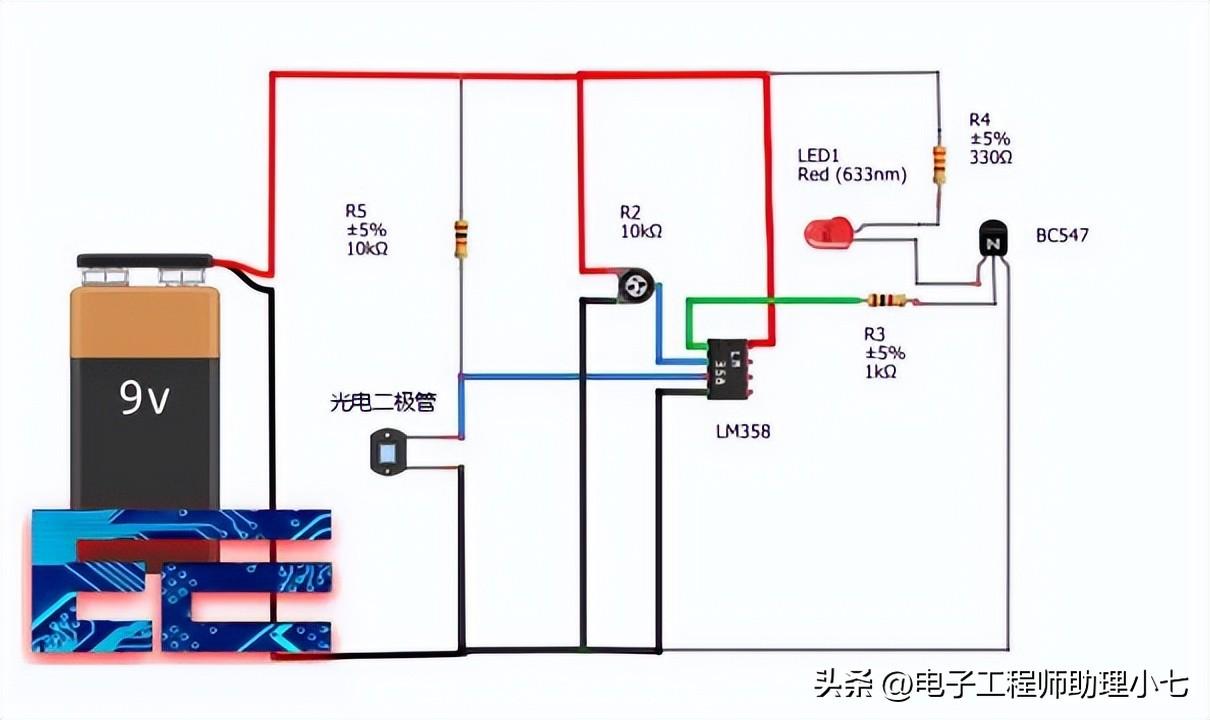
带有 lm358 的光电二极管
1)元器件清单
- lm358
- 光电二极管
- 10k电位器
- 10k电阻
- 晶体管bc547
- 引领
2)电路描述
10k 电阻与光电二极管串联,光电二极管的输出提供给 lm-358 的 3 号引脚。在这个项目中,当辐射落在光电二极管上时,led 将打开和关闭。电位器连接在引脚 2 上,用作参考电压。运算放大器的输出在 bc547 的基础上给出。集电极与发光二极管相连,发射极与地相连。
6、其他应用
- 传感器放大器
- 传统运算放大器电路
- 积分器、微分器、加法器、加法器、电压跟随器等,
- 直流增益模块、数字万用表、示波器
- 比较器(回路控制和调节)
- 有源滤波器
- 通用信号调理和放大
- 4 至 20ma 电流环路发送器
以上就是今天的内容,大家记得关注,给我点赞哦,欢迎大家在评论区留言,请各位大佬多多指教。
凯发官网首页的版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至598370771@qq.com举报,一经查实,本站将立刻删除。

凌烟阁二十四功臣全介绍(凌烟阁二十四功臣排
中国为何不承认科索沃(科索沃为何不被承认)
剃须刀品牌分享(浅谈性价比高的剃须刀品牌)
商朝首都有哪些(盘点商朝的十几个首都)

历史上庚子年灾难有哪些(庚子年大事记盘点)
白马非马的真正含义(白马非马何解)
苏门四学士分别是谁(苏门四学士介绍)